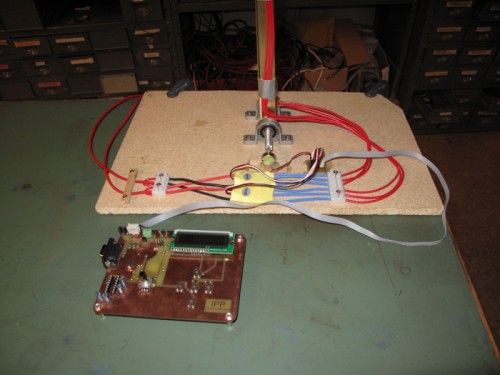
The plan is to make a “2-degrees of freedom inverted pendulum” realized with 3 or 4 RC plane motors and an 5-degrees IMU (Wikipedia). But first, I decided to make a “one-degree” pendulum to test the motor controllers and some control techniques. Some details:
- Controlled by an AVR ATmega128 with a discrete PID controller
- Angle measured with an potentiometer
- 2x RC plane motor controllers
- 2x RC plane motors
The controller board sends measurements over RS232.
As you can see in the video the pendulum is far from perfect. That is due to a hugeamount of noise on the angle measurement.. But that will not be a problem with the IMU, so I’m not gonna fix that problem now:P